
Spirit Systems produce awesome flybarless units for RC helicopter models. Per default Spirit units provide great support for OpenTX and FrSky gear. You can easily get telemetry from Spirit (also from connected ESC, like Hobbywing) and flawless OpenTX integration, which allows to set all Spirit parameters directly from FrSky radio (Horus or Taranis), using provided LUA script.
Things get a bit complicated if – in the same time – one would like to use standard FrSky telemetry sensors. In example if you connect FrSky GPS v2 sensor, it will collide with virtual telemetry sensors provided by Spirit flybarless unit, resulting in blocking telemetry signals from Spirit virtual sensors.
Fortunately there is simple workaround and in this article I will cover some of FrSky sensors, describing how I made them work with Spirit and standard Smart Port telemetry in FrSky / OpenTX.
Test Envorinment
- Spirit Pro flybarless unit running 2.7.0 firmware and telemetry integration with Hobbywing ESC
- FrSky Horus X12S radio, using internal TX module in ACCST D16 mode and running OpenTX 2.3.2
Solution
The solution is to play with physical & application IDs of FrSky sensors. Sometimes it is also required to change standard poll timings, either to avoid collisions or simply to make particular sensors refreshed more or less frequently. In example I want Tmp1 parameter of FrSky RPM sensor to be refreshed every 700ms, as it is measuring temperature of nitro engine, so I want it to react quite quickly to changes. Parameter Tmp2 of the same sensor is measuring ambient temperature, so it doesn’t need to be refreshed too often – 1400ms or even less frequent will do the job.
There is limited number of physical ID, so sometimes I chose to use existing, standard ones, so from sensors which I will probably not use in my helicopters (i.e. SPort to UART converter / sensor). If you do need to use these sensors, you may simply chose different physical and/or application IDs and also different timings, which suits your requirements. You may however need to test it on your own, as not all ID / timing combinations are working properly.
The below list contains sensors I have already tested (see Test Environment above) along with parameters I needed to change, to make them work all together (with Spirit flybarless unit, Hobbywing ESC telemetry, but also with other FrSky sensors connected to the same Smart Port bus).
FrSky Free Link application (Windows / Android or iOS) ir requied to change parameters of the sensors. You may also need one of FrSky USB dongles, like STK or AirLink S.
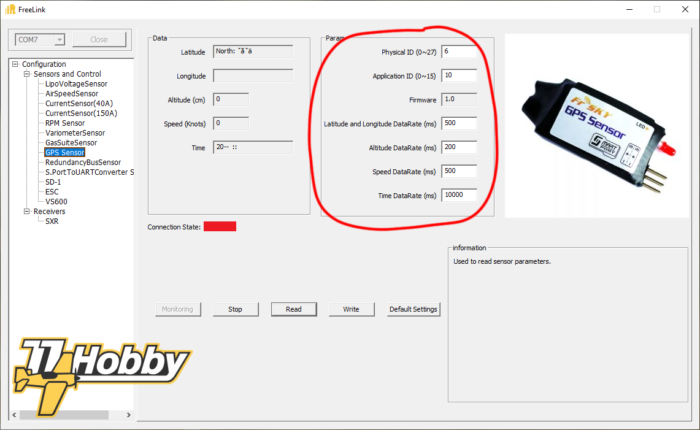
FrSky GPS v2 sensor
As I fly on the model airfield which is surrounded by bush, I really appreciate to have last resort coordinated in case I would need go and search for lost helicopter. The GPS v2 sensor provides very accurate location, but also altitude and speed, which can be used to generate nice graphs of my flights, i.e. in Google Earth application.
This sensor is not working with Spirit in standard setup. The below configuration is proven to work:
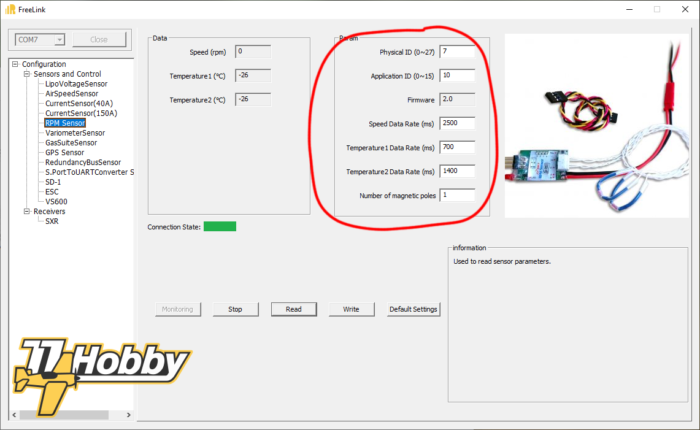
FrSky RPM sensor
This sensor has two temperature sensors, which is great for nitro models to monitor both motor and ambient temperatures. Its RPM sensor will be probably redundant to internal Spirit sensor, so you may want to ignore it (delete it from OpenTX config or simply not log it).
This sensor is not working with Spirit in standard setup. The below configuration is proven to work:
… more sensors to come
Legal disclaimer
The above settings are tested and it worked for me. However there is absolutely no guarantee nor liability behind – use on your own risk and responsibility.