
There are many popular lost RC model finders available on the market. They are usually simple and inexpensive devices, activated by signal loss or inactivity on RC channel which they are connected to, after some pre-defined time.
They work, but they are rather cumbersome in use, as they often activate themselves in unwanted conditions, often on the ground, before a flight or after landing. They are also dependent on model’s power source and having small buzzers.
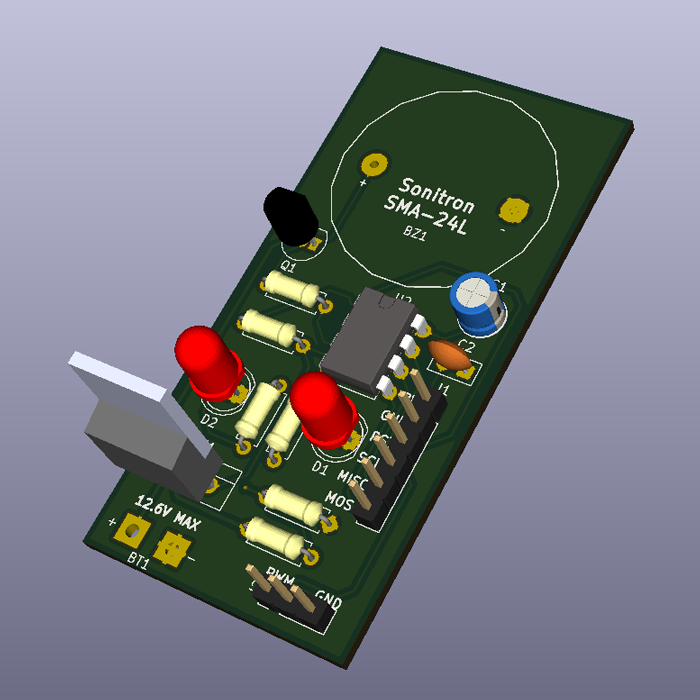
Thus I decided to develop my own lost model finder – MAK RC Model Finder (MRCMF) – under following assumptions: